Developers at the École Polytechnique Federale de Lausanne (EPFL, Switzerland) presented at the International Conference on Robotics and Automation (ICRA) an articulated robotic arm that can extend its range by detaching and independently moving towards an object to pick it up.
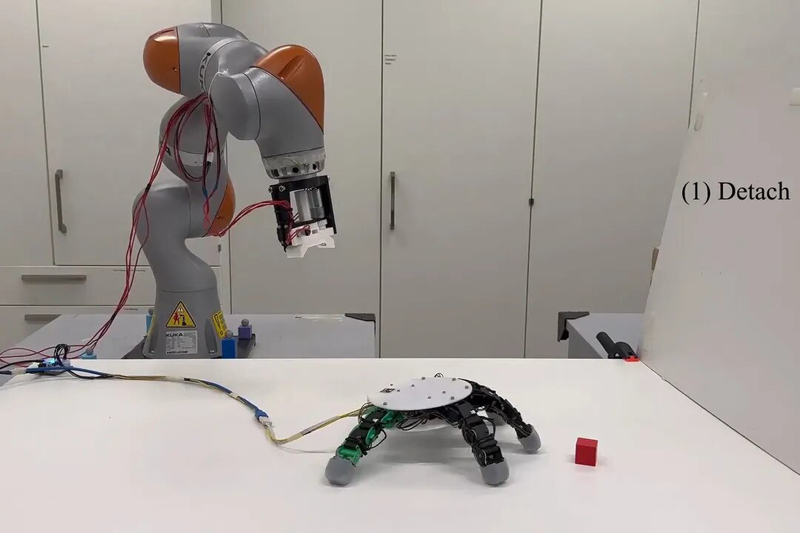
Image source: EPFL
Robotic arms are typically attached to a base on the floor or other structure for added stability, which limits their range. The goal of the research, conducted at EPFL’s Laboratory of Algorithms and Learning Systems (LASA), was to develop a bimodal robotic arm with enhanced gripping capabilities, including periodic independence from the arm to which it is attached.
Robohands are usually created for one purpose: to hold and move objects. To develop a robotic arm that could do this while moving on its own, the researchers generated and refined the basic design using a genetic algorithm that relies on biology and the MuJoCo physics simulator to test the prototype’s functionality.
Researchers have determined the optimal position and number of jointed fingers required—there are five of them, like a human’s. The fingers of the hand can bend in two directions, which allows it not only to “crawl”, but also to grasp two objects at the same time, while attached to the limb of a robotic manipulator. She can also use several fingers to lift objects while the others function as support.
The robotic arm also has a magnetic wrist mount. If you add such an articulated robotic arm to, for example, the Spot robot, it can be used to explore or analyze areas that are currently inaccessible due to its size and limited maneuverability.